プログラムレポート
プログラミング教室(中級編) ちびっこプログラムの様子(2022年12月13日、20日開催)
公開日:2022年12月27日
-
ちびっこプログラム
12月13日と20日は株式会社コサウェル様にご協力いただき、【ステップアップ講座】プログラミング教室を開講しました。

【ステップアップ講座】とは、未就学児と大人で新しいことにチャレンジしながら「できた!」という感覚を自信にしていくプログラムです。
13日は赤外線センサーを使ったプログラム、20日はループするプログラムと傾きセンサーを使ったプログラムに挑戦しました。
どちらのプログラミング教室も、「初級編」に参加した方向けの内容になっています。
▼「初級編」の様子はこちらからどうぞ。
中級編ではまず、初級編のおさらいをします。
相棒のロボット、マイコーはもう組み立ててあるので、思い出しながら「LEDを光らせる」「音を鳴らす」「前後に走らせる」の3つのプログラムを作りました。
皆さん、しっかり覚えていましたね。
◆中級編1
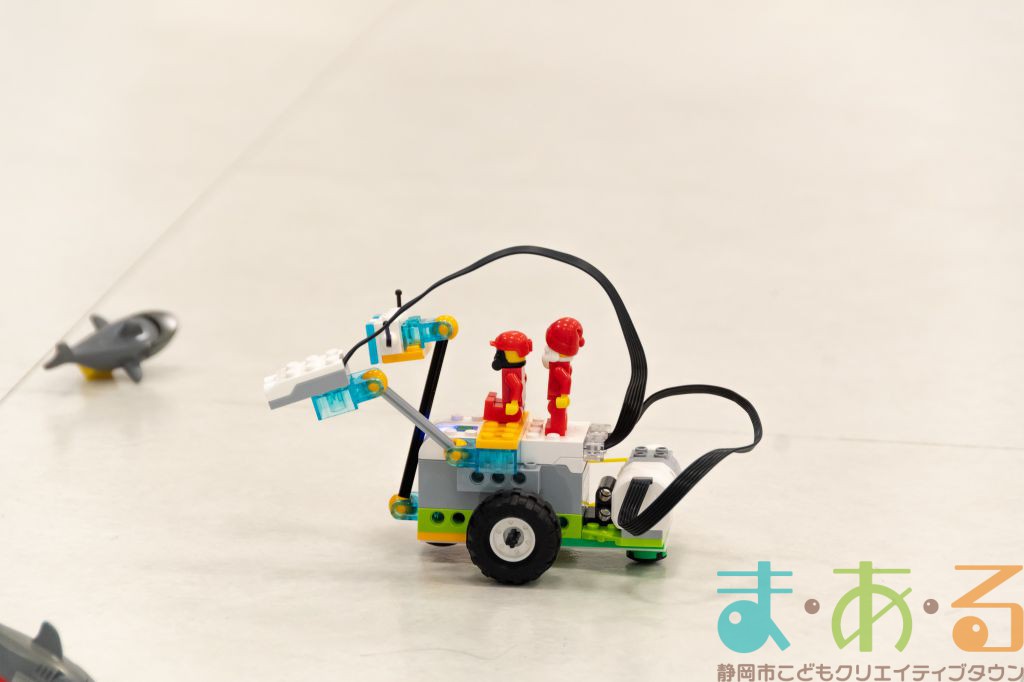
中級編1では赤外線センサーを使ったプログラムに挑戦します。

まずはマイコーにセンサーを取り付けました。
赤外線センサーは、「センサーの前にあるものとの距離」を常に測っていて、それを数字にしてマイコーに送っています。
初級編でやった、黄色い「決まった時間だけ走らせるプログラム」の時間のブロックを赤外線センサーのブロックと入れ替えてみます。

すると、どうでしょう。
時間に関係なく走っているマイコーが、センサーで物を見つけて止まるようになりました!
自動車の追突防止の仕組みを簡単にしたプログラムにマイコーが進化しましたね。
中級編1ではこのセンサーを使って、島を見つけて島から人を助けるミッションに挑戦します。
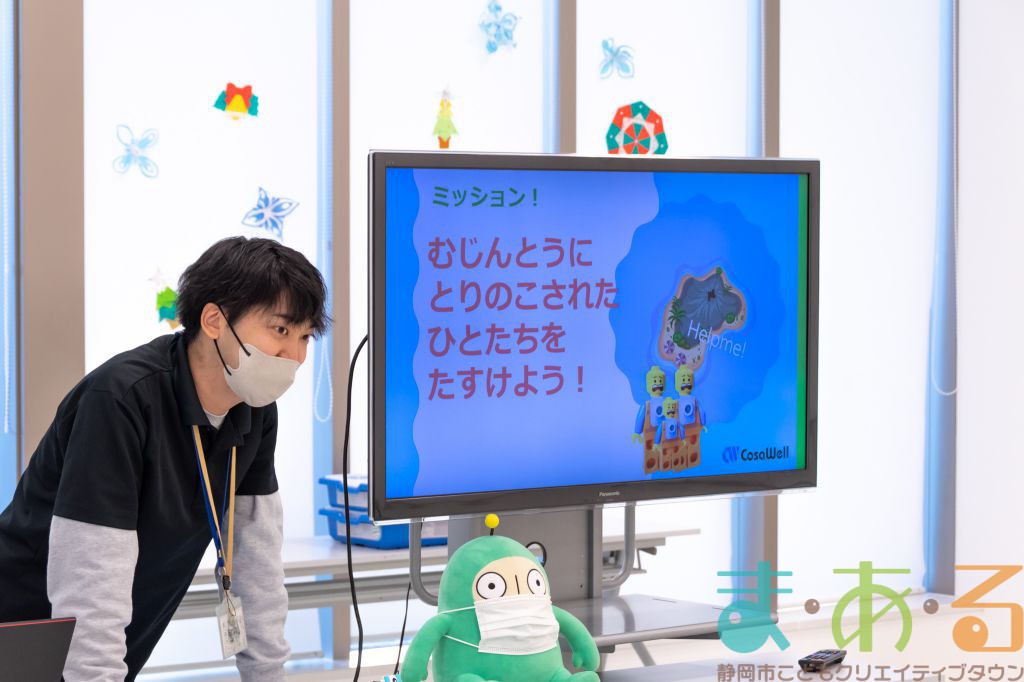
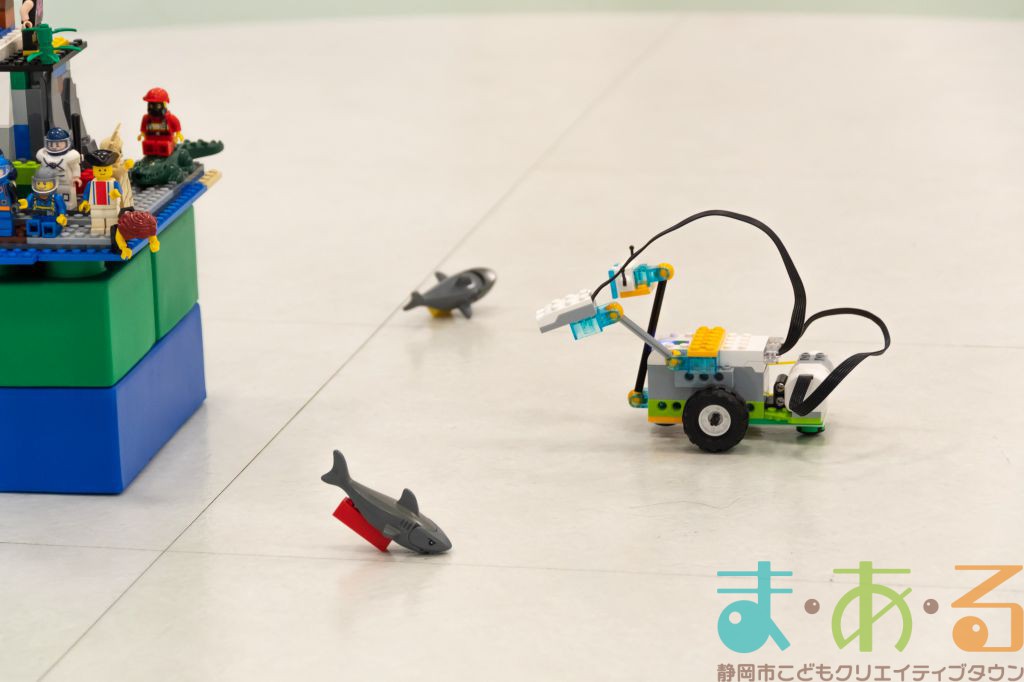
まわりにサメが泳ぐレゴの島にたくさんの人が助けを待っています。


どうやら島にはワニもいるみたいです。ここでマイコーの出番です!
島から離れたところから、マイコーを出発させて、サメに当たらないように島の手前で止まって音でお知らせするようにプログラムを作りましょう!
プログラムが出来上がったら、救出ミッションスタート!
サメに当たらないコースにマイコーを置いて、プログラムを実行します。

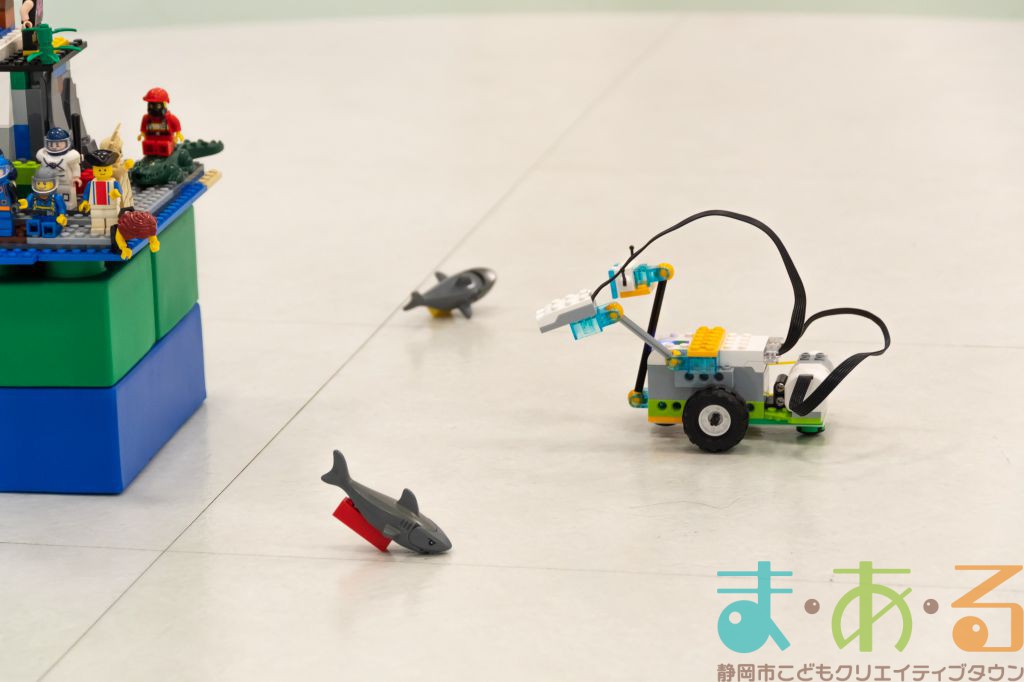

上手く島を見つけることが出来たら、先生が島にいる人をマイコーに乗せてくれるので、バックするプログラムで自分のところまで戻します。
赤外線センサーを使ったプログラム、分かったかな?
◆中級編2
中級編2では最初に、ずっと同じプログラムを繰り返す「ループ」のプログラムを学びます。
まず初めにLEDを光らせるプログラムを3つつなげて実行してみましょう。
「LEDを光らせるプログラム」はそれだけだと決められた順番で光って終わってしまいます。
この「順番に光るプログラム」を「ループ」のブロックで挟んでみます。


するとどうでしょう。
プログラムが終わることなく、ずっとLEDが左から順番通りに光り続けるようになりました。
イルミネーションなども、こういったプログラムで出来上がっているんですね。
「ループ」のプログラムが出来るようになったら、今度は「傾きセンサー」に挑戦です。

先生が持っているマイコーの背中に何やらついていますね。
これが傾きセンサーです。
まずはマイコーにセンサーを取り付けました。




センサーを取り付けたら、しっかりスマートハブブロックにコードを差し込みましょうね。

コードをさしたら出来上がり!
傾きセンサー付きマイコーに進化ですね。


傾きセンサーは「センサーがどのくらい傾いているか」を常に測っていて、それを数字にしてマイコーに送っています。

タブレットの右下に、傾きセンサーが感じ取っている傾きが、数字になって表示されます。
どのくらい傾けると数字がどう変化するか確認しました。
まずは傾きの変化によって、順番に光を変えるプログラムを作りました。
時間のブロックの数字のところを傾きセンサーブロックと入れ替えます。

傾きセンサーブロックをタッチして、感知する傾き方を選んでプログラムを作ります。
マイコーはセンサーからの傾きの数字を待って、傾きの数字が送られてくるとLEDの色を変えてプログラムを先に進めるようになりました。
ループで挟むと、傾きを変え続けることでLEDの光が変わるようになりました。
次にモーターを回すパワーについて教えてもらいました。
モーターを回すパワーは0から9まであって、0だとモーターは動きません。
数字が大きくなるほど、パワーは大きくなり、早く走るようになります。
ここで先生から問題です。
「パワーの数字」のところを「傾きセンサーブロック」と入れ替えるとどうなるでしょうか?
傾きセンサーは傾き具合を数字にして、マイコーに送っています。
つまり、坂に置いてあるマイコーは常に坂の傾き具合の数字を受け取っているということです。
ということは、坂の傾き方がそのままモーターを回転させるパワーになっているということなんですね!
先生が説明してくれました。
実際に坂にマイコーを置いてやってみましょう!

プログラムを実行していませんが、この時すでに傾きは「3」になっています。
坂が傾いているときはマイコーがゆっくりと坂を上りました。そして、坂を上り切って平らになると傾き具合は「0」になるのでマイコーはストップしました。
「傾き方」を「パワー」に変えるプログラム、分かったかな?
またの開催をお楽しみに!
画像ギャラリー